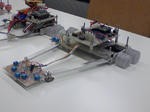
最も新しいバージョンは2007年の全日本マイクロマウス大会(ロボトレース部門)に参加した「linelive(ラインライブ)」

linelive(クリックで別ウィンドウ)
走行動画
http://jp.youtube.com/watch?v=8Psq_gqB9MI
linelive スペック
―――――全般―――――
電源::リチウムポリマーバッテリー(エンンルート)11.1V 1000mAh以上(容量はよく分からない)
車輪タイプ:4輪車で駆動輪は2つ
重量:750g
ホイルベース:100mm
センサー長:ステアリング回転軸より100mm
ステアリング方式:アッカーマンリンク
その他:吸着装置を搭載
―――――駆動系―――――
駆動方式:RR(リヤエンジン・リヤ駆動)
出力:maxon motorのRE16を1駆動輪に2本、計4本使用している
無負荷時最高速度:7m/s
正直出力が物足りないのでモーターを新しくしたい。
モータドライバが電流を吐けていないのかもしれないが…
―――――トレース方式―――――
センサー:先端のライントレース用が、アナログが2つとデジタルが3つ。先読みがデジタルで1つ。
ステアリングモーター:maxon motor RE16
角度センサー:半固定抵抗(ボリューム)で電圧を読み取っている
制御方式:アナログ制御(JMCRで主流のものと同じ)
制御方式からセンサーのスペック、ステアリングのガタまでダメ要素が相まってゲインが上げられない。
実際使っているステアリングの出力は40%程度…何とかしたい。
―――――回路―――――
CPU:H8/3.48F-ONE(JMCR指定のCPUボード)
モータドライバ(駆動&ステアリング):市販のTA8440HQ
エンコーダー搭載
―――――吸着装置―――――
モーター:ブラシレスアウターローター Hacker A20-30M
ファン:遠心力ファン 直径100mm 圧さ10mm 羽数24枚
吸着力:1200g
―――――プログラム―――――
先読みセンサによってコーナー入り口が100mm手前で判定できる為、コースを覚えるアルゴリズムは使用していない。
直線・カーブのスピードをdipスイッチで設定できるようになっていて、競技中はこれでスピードを変える。
実スピードはエンコーダーにて取得。
ステアリングはゲインを上げられない。吸着装置はいい出来なのに、直線スピードが極端に遅くなるためスカートが付けられない。ツインで積んでいるのにモーター出力が弱い。
などなど、目に見えて速くできる要素がたくさんあって正直たるくさんは嬉しいです…('A`)
今年度オーバースペックで組んだつもりがもう頭打ちとは…
因みに今年度のマシンは、去年度のマイクロマウス大会1位のマシンより大分速いです。
それなのに今年は運が良くても (2上位2台がコースアウトして繰り上がって) 3位。
まったく競技大会とは恐ろしいものです。
狭山工業さんのロボトレースロボット
来年度余裕があれば”狭山工業さんのマシン”に吸着装置付けたようなの作りたいな~。
絶対速いぞ!?軽いし、制御しやすそうだし、吸着装置ついていなくても既に速いし。
PR